.png)

Autonomous vehicle mapping
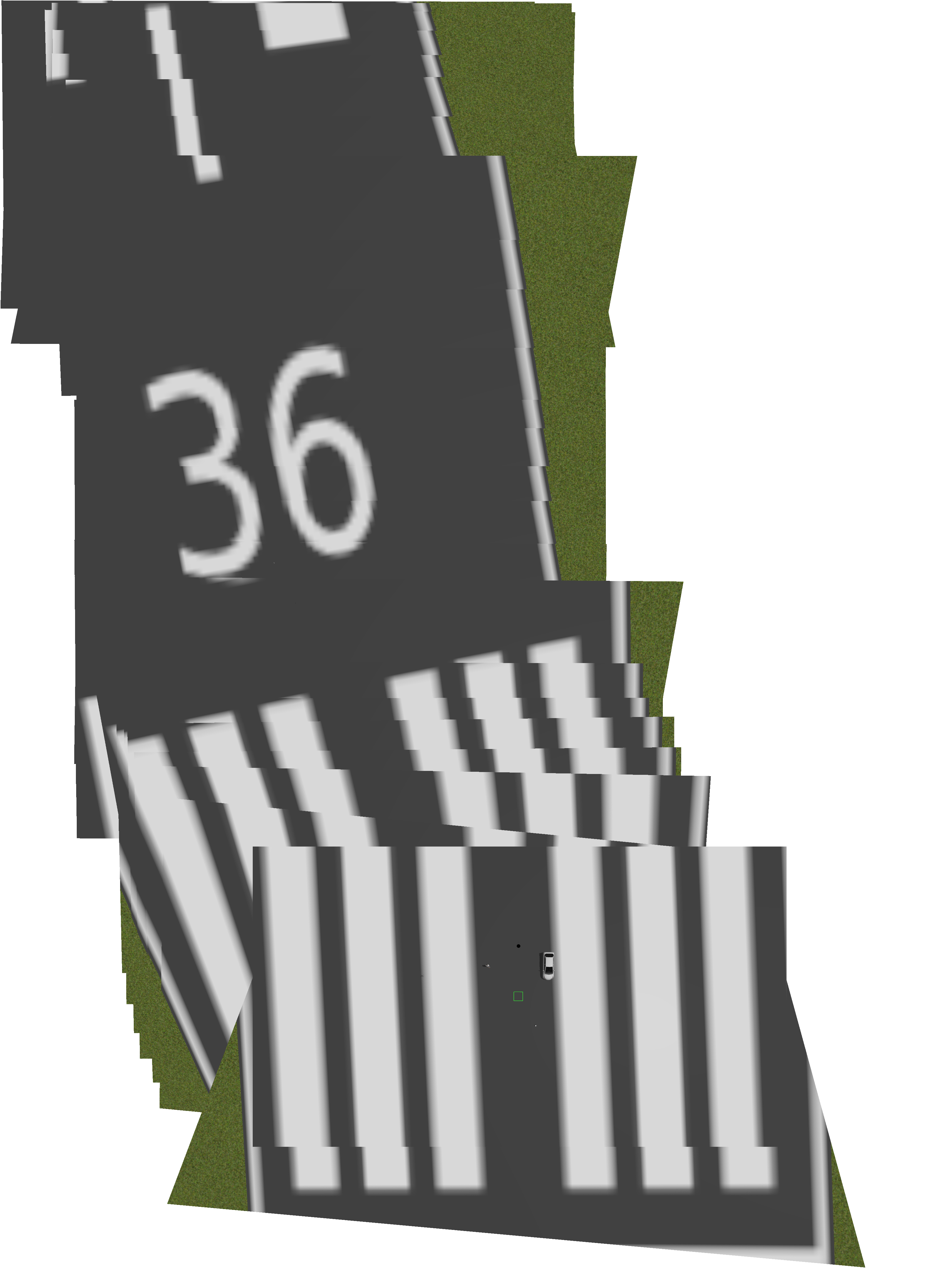
A real-time visual simultaneous localization and mapping (vSLAM) system for an unmanned drones. The 2D reconstruction (mapping) of the camera feed from the drone relies on visual odometry (VO) to precisely place the image together using SIFT and only uses GPS pose for initial rough placement. Well, as long it's not in a simulation with smooth textures, or else SIFT or most VO system fails. Checkout a more realistic mapping from real images:
map


 GitHub
GitHub
 LinkedIn
LinkedIn
 Google Scholar
Google Scholar